
论文发布日期:2020-12-16
发布会议/期刊:NeurIPS(CCF-A)
扩散模型太难了,论文看不懂,直接参考别人的写的原理笔记,省略了一些
扩散模型原理
背景知识
先验概率和后验概率
- 先验概率:根据以往经验和分析得到的概率,往往作为“由因求果“问题中的“因"出现,如
- 后验概率:指在得到“结果“的信息后重新修正的概率,是“执果寻因“问题中的“因",如
- 先验概率:根据以往经验和分析得到的概率,往往作为“由因求果“问题中的“因"出现,如
贝叶斯公式
是先验概率, 是后验概率, 是证据, 是似然,表示归因(证据)力度 高斯分布
表示均值,即期望。 表示标准差
前向过程
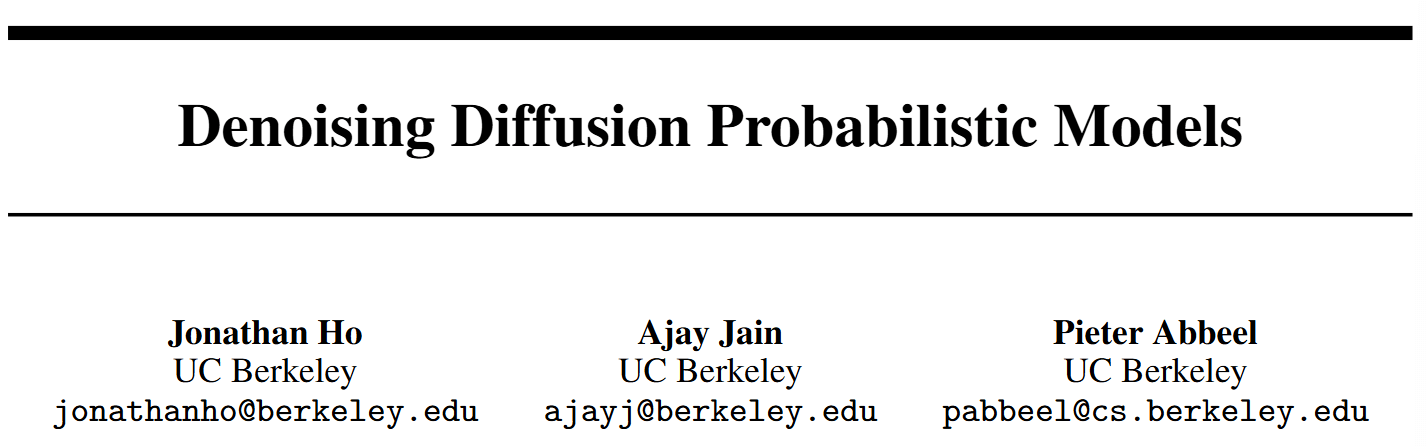
前向过程是图片加噪的过程,将原图通道归一化后,取一张同样大小的高斯噪声图片相加迭代,得到
即:
其中
现在思考一个问题,能否直接从
将下面的式子带入上面有
化简可得
现在我们可知
我们已知
因此
我们将原始得两个随机噪声可以合写为一个分布以上分布的噪声,得到
以此类推,可以得到
为方便表示,我们可以写成
反向过程
现在我们得到了一张不断加噪的图片,我们如何将这张图片重新还原成原图呢
我们先思考如何从
因为这些概率都是以
我们现在来看右边三个概率
因为
所以三个概率满足下面三个分布
将它们写为高斯分布的概率密度函数形式可以得到
将这三个概率全部带入前面的贝叶斯公式可得
由此可知
我们的目标是利用
代入可得
至此就得到了
看上图我们可知
优化目标
我们如何来预测噪声
总的来说,在训练阶段,我们原本想推断条件分布
神经网络
我理解来讲就是,先给定图片
训练的损失函数就是让神经网络
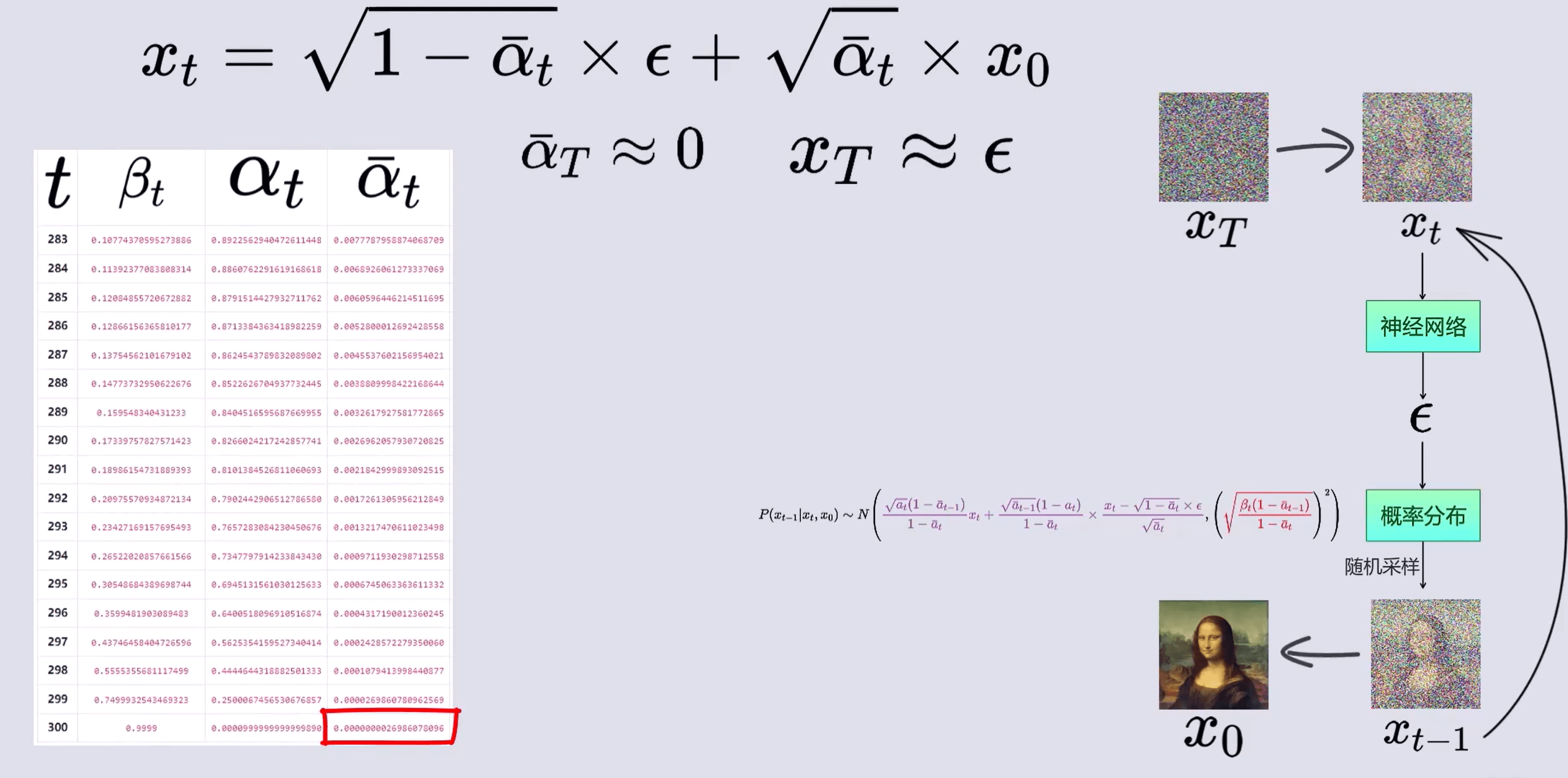
经过复杂的数学推导和重参数化技巧可以得到扩散模型的训练和采样算法,最终得到简化版:
一句话归纳:训练过程学习的是每一步的噪声预测函数
训练和采样过程伪代码如下:
我的疑问:
- 正常的有监督训练都是学习一个确定的标签,但是扩散模型中同一个
每个epoch中每个时间点间产生的噪声都不一样,这怎么训练? - 用原来的后验分布
来近似 ,最后不应该生成的图片大致都和训练集的差不多吗,为什么模型能生成完全没见过的图片? - 前向过程不是一次采样高斯噪声就能得来吗,那反向过程中迭代用的标签都是这一个噪声吗?
模型设计
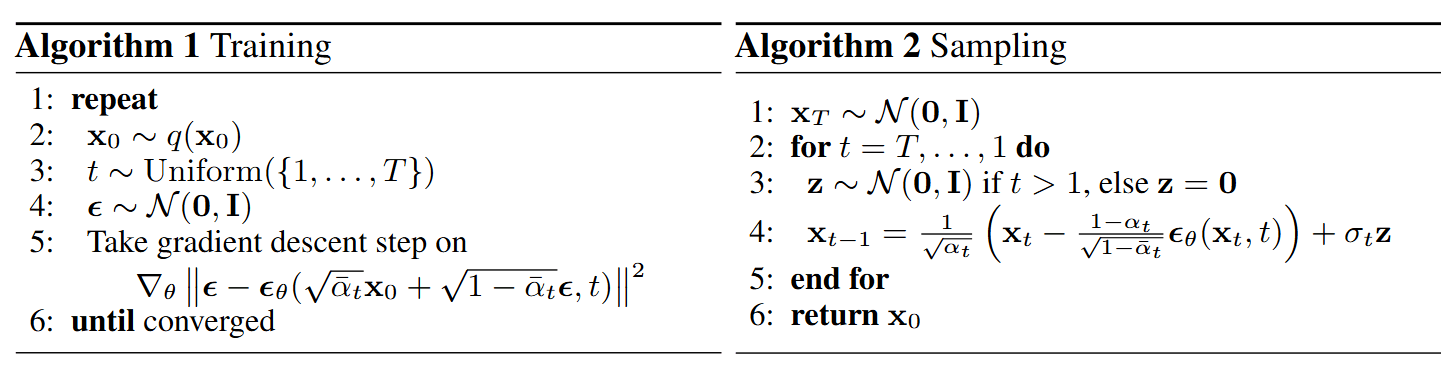
由于噪音和原始数据是同维度的,所以作者选择采用AutoEncoder架构来作为噪音预测模型。DDPM所采用的模型是一个基于residual block和attention block的U-Net模型
U-Net属于encoder-decoder架构,其中encoder分成不同的stages,每个stage都包含下采样模块来降低特征的空间大小(H和W),然后decoder和encoder相反,是将encoder压缩的特征逐渐恢复。U-Net在decoder模块中还引入了skip connection,即concat了encoder中间得到的同维度特征,这有利于网络优化。DDPM所采用的U-Net每个stage包含2个residual block,而且部分stage还加入了self-attention模块增加网络的全局建模能力。 另外,扩散模型其实需要的是T个噪音预测模型,实际处理时,我们可以增加一个time embedding(类似transformer中的position embedding)来将timestep编码到网络中,从而只需要训练一个共享的U-Net模型。具体地,DDPM在各个residual block都引入了time embedding,如上图所示
预览: